

一、概述
记录 RKNN 的部署流程,测试 YOLOv5 模型在不同硬件平台上的性能表现,分析适用场景。
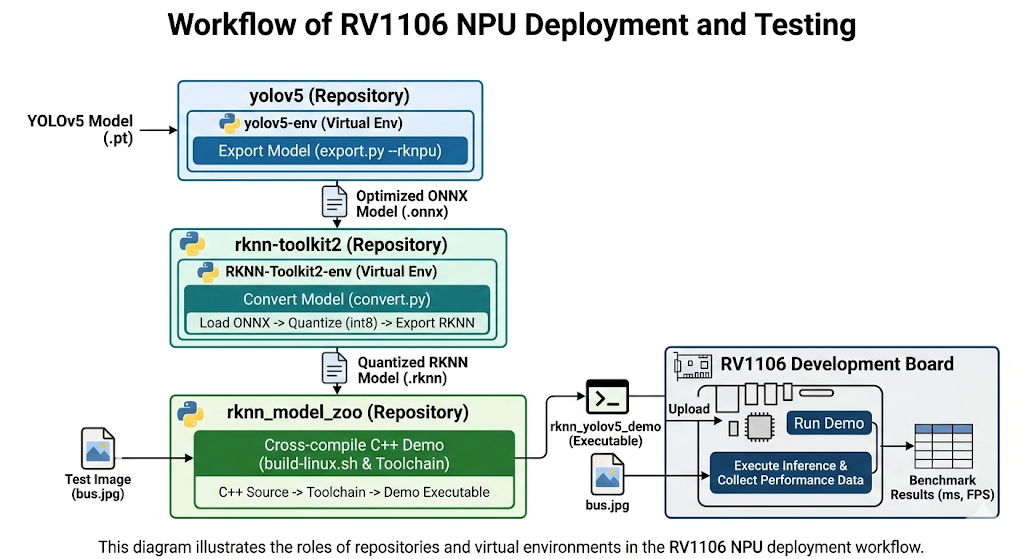
需要三个仓库:
-
一个极其流行的单阶段目标检测算法实现库。它是模型的来源。在这里获取原始的权重文件(
.pt),并利用其中的export.py脚本,配合--rknpu参数,导出一个专门为瑞芯微 NPU 结构优化过的中间格式(.onnx)。 -
瑞芯微为旗下 NPU 芯片提供的软件开发套件(SDK)。它是转换的核心工具。它提供 C 或 Python 接口,负责把
.onnx模型转换成板子能跑的.rknn格式。此外,它还承担了模型量化(将浮点数转为int8)和精度评估的重要任务。 -
瑞芯微官方提供的各种主流算法(如 YOLO、MobileNet 等)的部署示例集合。测试工程模板。它提供了经过优化的 C++ 源码(如
rknn_yolov5_demo)和交叉编译脚本。最终在板子上运行的那个“测速程序”,就是从这个仓库里编译出来的。
两个python虚拟环境
-
yolov5 环境
安装了原生 PyTorch 和 YOLOv5 所需的高版本依赖。负责模型导出。在这个环境下,运行
python export.py,把.pt变成.onnx。一旦拿到.onnx,这个环境的任务就完成了。 -
RKNN-toolkit2 环境
安装了特定版本的
onnx和瑞芯微私有的rknn-toolkit2软件包。负责模型量化与转换。在这个环境下,运行转换脚本,把上一步得到的.onnx喂进去,经过int8量化,最后得到出.rknn文件。
二、环境搭建
克隆上述三个仓库到~/projects/rknn/
RKNN-toolkit2 环境搭建
conda create -n RKNN-Toolkit2 python=3.9conda activate RKNN-Toolkit2
# 克隆工具链git clone https://github.com/airockchip/rknn-toolkit2.gitcd rknn-toolkit2
# 安装依赖(注意根据 Python 版本选择对应的 requirements 文件)pip install -r rknn-toolkit2/packages/x86_64/requirements_cp39-2.3.2.txt -i https://pypi.tuna.tsinghua.edu.cn/simple/
# 安装 RKNN-Toolkit2 软件包pip install rknn-toolkit2/packages/x86_64/rknn_toolkit2-2.3.2-cp39-cp39-manylinux_2_17_x86_64.manylinux2014_x86_64.whlYolov5 环境搭建
# 克隆仓库git clone https://github.com/airockchip/yolov5.git
cd yolov5
# 创建虚拟环境conda create -n yolov5 python=3.9# 进入虚拟环境并安装依赖库conda activate yolov5pip install -r requirements.txt三、转换模型:ONNX to RKNN
获取导出 ONNX 文件
(yolov5 conda 环境下)
cd yolov5python export.py --rknpu --weight yolov5s.pt得到 yolov5s.pt、yolov5s.onnx和RK_anchors.txt
获取 RKNN 文件
(在RKNN-toolkit2 conda 环境下)
cd rknn_model_zoo/examples/yolov5/python
# 指定 onnx 模型的位置和 target(rv1106)python3 convert.py ~/projects/rknn/yolov5/yolov5s.onnx rv1106转换为RKNN文件examples/yolov5/model/yolov5.rknn
四、编译测试程序
在 ~/projects/rknn/rknn_model_zoo/examples/yolov5/cpp
# 导入编译工具链路径export GCC_COMPILER=/home/hao/projects/luckfox-pico/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin/arm-rockchip830-linux-uclibcgnueabihf
./build-linux.sh -t rv1106 -a armv7l -d yolov5编译并完成安装,将rknn_model_zoo/install/rv1106_linux_armv7l/rknn_yolov5_demo通过 scp 协议传输到开发板上,执行程序
./rknn_yolov5_demo model/yolov5.rknn model/bus.jpg(原版代码只会执行一次,修改了demo的源码,让它连续执行10次并获取精确的 NPU 推理时常,计算结果后打印出来,修改后的源码在 https://github.com/Hyrsoft/rknn_model_zoo/tree/yolov5_benchmark/examples/yolov5/cpp)
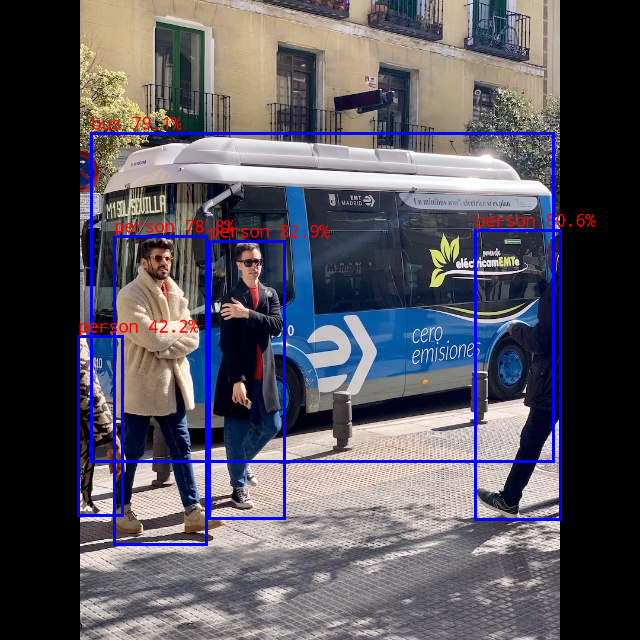
运行结果:
[root@luckfox rknn_yolov5_demo]# ./rknn_yolov5_demo model/yolov5.rknn model/bus.jpgload lable ./model/coco_80_labels_list.txtmodel input num: 1, output num: 3input tensors: index=0, name=images, n_dims=4, dims=[1, 640, 640, 3], n_elems=1228800, size=1228800, fmt=NHWC, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922output tensors: index=0, name=output0, n_dims=4, dims=[1, 255, 80, 80], n_elems=1632000, size=1632000, fmt=NCHW, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922 index=1, name=367, n_dims=4, dims=[1, 255, 40, 40], n_elems=408000, size=408000, fmt=NCHW, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922 index=2, name=369, n_dims=4, dims=[1, 255, 20, 20], n_elems=102000, size=102000, fmt=NCHW, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922input_attrs[0].size_with_stride=1228800model is NHWC input fmtmodel input height=640, width=640, channel=3origin size=640x640 crop size=640x640input image: 640 x 640, subsampling: 4:2:0, colorspace: YCbCr, orientation: 1scale=1.000000 dst_box=(0 0 639 639) allow_slight_change=1 _left_offset=0 _top_offset=0 padding_w=0 padding_h=0rga_api version 1.10.1_[0]rknn_run========================================NPU Inference time:First run time: 85.209 msAverage time of 10 runs: 86.624 msEstimated FPS: 11.54========================================person @ (209 242 283 516) 0.828person @ (474 230 561 522) 0.798person @ (114 235 207 543) 0.796bus @ (93 133 549 462) 0.787person @ (78 330 122 519) 0.408write_image path: out.png width=640 height=640 channel=3 data=0xa5a31000推理结果:
五、结果分析
瑞芯微主流 SoC NPU 性能实测数据汇总表
除了 RV1106G3 的数据为本文章实测外,其他数据由触觉智能的文章提供。
测试条件:YOLOv5s-640-640 模型,INT8 量化,640*640 分辨率测试图片。
| 芯片型号 | 核心硬件参数 | 首次运行耗时 (ms) | 连续10次平均耗时 (ms) | 帧率估算 (FPS) |
|---|---|---|---|---|
| RV1106G3 | 单核 A7 + 1.0 TOPS NPU | 85.209 | 86.624 | 11.54 |
| RK3562 | 四核 A53 + 1.0 TOPS NPU | 66.165 | 51.885 | 19.3 |
| RV1126B | 四核 A53 + 3.0 TOPS NPU | 26.897 | 26.0425 | 38.4 |
| RK3576 | 4核A72 + 4核A53 + 6.0 TOPS NPU | 55.395 | 23.7342 | 42.1 |
| RK3588 | 4核A76 + 4核A55 + 6.0 TOPS NPU | 30.887 | 21.2581 | 47.0 |
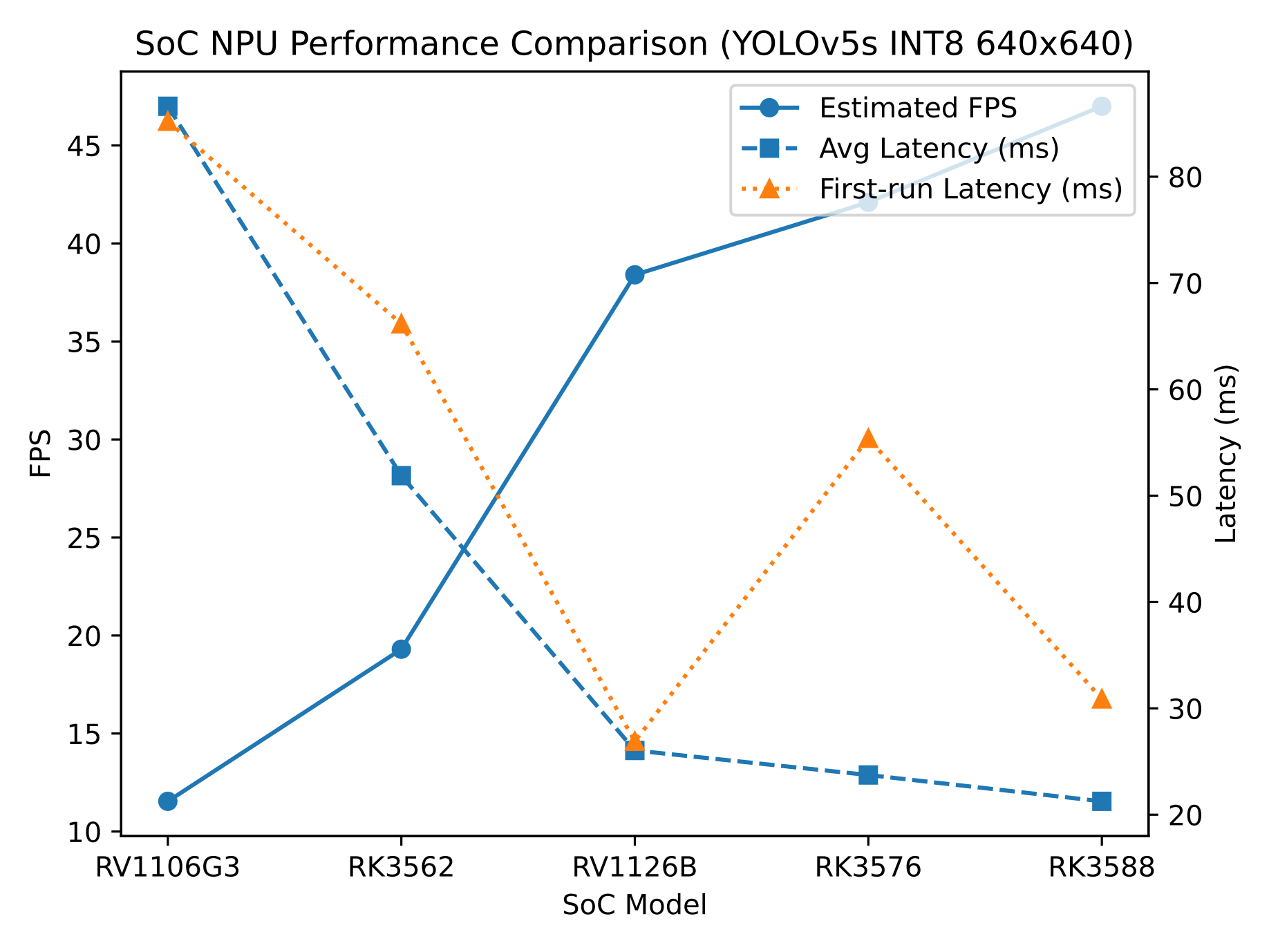
实验结果分析与硬件适配性评估
通过对瑞芯微(Rockchip)系列 SoC 的推理性能实测发现,其 NPU 推理效率遵循 RK3588 > RK3576 > RV1126B > RK3562 > RV1106G3 的梯度分布,其中具备 6 TOPS 算力的 RK3588 与 RK3576 以超过 40 FPS 的表现领跑高实时性场景;作为对比,主打超低功耗与成本优势的 RV1106G3(单核 A7 + 1.0 TOPS NPU)在处理 640*640 大分辨率模型时实现了 11.54 FPS 的实测帧率,且展现出极佳的时延确定性,其首次运行与平均耗时波动显著低于多核架构芯片,使其在智能门铃、低功耗 IPC 等对响应稳定性要求较高、且成本敏感的垂直场景中,展现出比四核 A53 架构的 RK3562 更为突出的性价比优势。